Shenzhen University, China
Shenzhen University, China



 paper
paper
 benchmark DATASET
B-SEG DATASET
code
supp
benchmark DATASET
B-SEG DATASET
code
supp
 Choose the way of data downloading (Dropbox by default)
Choose the way of data downloading (Dropbox by default)
 Baidu
Baidu

Click images
for a larger view
| Category | Qingdao | Wuhu | Longhua | Yuehai | Lihu | Yingrenshi |
|---|---|---|---|---|---|---|
| Labeled Point Cloud |
26.5 GB | 27.8 GB | 29.1 GB | 17.5 GB | 11.5 GB | 0.92 GB |
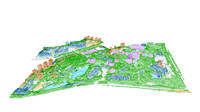
| Scene Point Cloud |

|

|

|

|

|

|
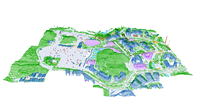
| Semantic Segmentation |
|

|

|

|
|

|
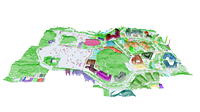
| Fine-grained Building Category |

|

|
|
|
|

|
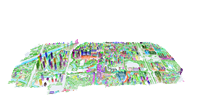
| Building Instance Segmentation |

|
|

|

|
|

|
| Total# | 594.06 M | 625.08 M | 653.90 M | 393.37 M | 255.12 M | 22.22 M |
| Buliding | 269.59 M | 285.28 M | 256.39 M | 117.98 M | 65.18 M | 14.97 M |
| Ground | 114.22M | 133.32 M | 158.62 M | 69.60 M | 80.54 M | 4.39 M |
| Water | 11.46 M | 20.95 M | 0.26 M | 3.86 M | 2.46 M | 0 |
| Boat | 4.20M | 409 | 852 | 0 | 2,490 | 0 |
| Vegetation | 179.50 M | 175.69 M | 225.50 M | 197.83 M | 104.09 M | 1.66 M |
| Vehicle | 15.05 M | 8.24 M | 11.35 M | 1.16 M | 2.08 M | 0.85 M |
| Bridge | 37,074 | 1.61 M | 1.77 M | 2.93 M | 0.78 M | 0.35 M |
| Images | ||||||
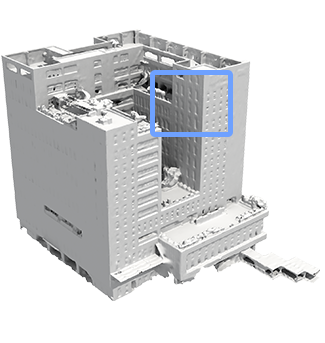
| Textured Meshes |
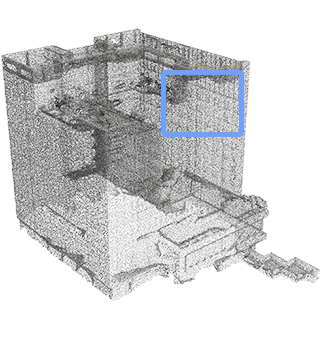
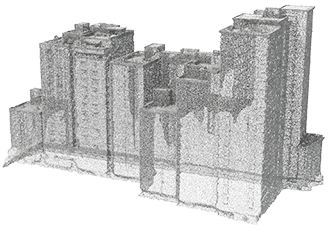
Scene Point Cloud
Semantic Segmentation
Fine-grained Building Category
Building Instance Segmentation
| Total# | 594.06 M |
| Buliding | 269.59 M |
| Ground | 114.22M |
| Water | 11.46 M |
| Boat | 4.20M |
| Vegetation | 179.50 M |
| Vehicle | 15.05 M |
| Bridge | 37,074 |
| Images | |
| Textured Meshes |
Scene Point Cloud
Semantic Segmentation
Fine-grained Building Category
Building Instance Segmentation
| Total# | 625.08 M |
| Buliding | 285.28 M |
| Ground | 133.32 M |
| Water | 20.95 M |
| Boat | 409 |
| Vegetation | 175.69 M |
| Vehicle | 8.24 M |
| Bridge | 1.61 M |
| Images | |
| Textured Meshes |
Scene Point Cloud
Semantic Segmentation
Fine-grained Building Category
Building Instance Segmentation
| Total# | 653.90 M |
| Buliding | 256.39 M |
| Ground | 158.62 M |
| Water | 0.26 M |
| Boat | 852 |
| Vegetation | 225.50 M |
| Vehicle | 11.35 M |
| Bridge | 1.77 M |
| Images | |
| Textured Meshes |
Scene Point Cloud
Semantic Segmentation
Fine-grained Building Category
Building Instance Segmentation
| Total# | 393.37 M |
| Buliding | 117.98 M |
| Ground | 69.60 M |
| Water | 3.86 M |
| Boat | 0 |
| Vegetation | 197.83 M |
| Vehicle | 1.16 M |
| Bridge | 2.93 M |
| Images | |
| Textured Meshes |
Scene Point Cloud
Semantic Segmentation
Fine-grained Building Category
Building Instance Segmentation
| Total# | 255.12 M |
| Buliding | 65.18 M |
| Ground | 80.54 M |
| Water | 2.46 M |
| Boat | 2,490 |
| Vegetation | 104.09 M |
| Vehicle | 2.08 M |
| Bridge | 0.78 M |
| Images | |
| Textured Meshes |
Scene Point Cloud
Semantic Segmentation
Fine-grained Building Category
Building Instance Segmentation
| Total# | 22.22 M |
| Buliding | 14.97 M |
| Ground | 4.39 M |
| Water | 0 |
| Boat | 0 |
| Vegetation | 1.66 M |
| Vehicle | 0.85 M |
| Bridge | 0.35 M |
| Images | |
| Textured Meshes |
| Method | Qingdao | Wuhu | Longhua | Campus | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ↑AP | ↑AP50 | ↑AP25 | ↓T(s) | ↑AP | ↑AP50 | ↑AP25 | ↓T(s) | ↑AP | ↑AP50 | ↑AP25 | ↓T(s) | ↑AP | ↑AP50 | ↑AP25 | ↓T(s) | |
| PointGroup [1] | 0.364 | 0.512 | 0.578 | 9.80 | 0.502 | 0.662 | 0.748 | 5.90 | 0.318 | 0.443 | 0.556 | 5.73 | 0.117 | 0.235 | 0.455 | 3.65 |
| HAIS [2] | 0.320 | 0.465 | 0.506 | 7.11 | 0.383 | 0.616 | 0.711 | 3.62 | 0.159 | 0.249 | 0.350 | 3.17 | 0.002 | 0.012 | 0.146 | 3.26 |
| SoftGroup [3] | 0.383 | 0.446 | 0.487 | 6.55 | 0.536 | 0.649 | 0.721 | 3.61 | 0.151 | 0.199 | 0.300 | 3.06 | 0.253 | 0.364 | 0.439 | 2.16 |
| DyCo3D [4] | 0.285 | 0.376 | 0.498 | 5.20 | 0.470 | 0.620 | 0.732 | 3.04 | 0.020 | 0.045 | 0.196 | 1.77 | 0.029 | 0.063 | 0.180 | 1.67 |
| DKNet [5] | 0.383 | 0.434 | 0.474 | 2.15 | 0.474 | 0.575 | 0.650 | 1.20 | 0.077 | 0.154 | 0.253 | 1.78 | 0.044 | 0.109 | 0.251 | 0.88 |
| B-Seg (Ours) | 0.453 | 0.550 | 0.672 | 1.19 | 0.549 | 0.674 | 0.767 | 0.99 | 0.402 | 0.513 | 0.618 | 1.16 | 0.261 | 0.386 | 0.535 | 0.74 |
| Method | ↑AP | ↑AP50 | ↑AP25 | ↓T(s) |
|---|---|---|---|---|
| PointGroup [1] | 0.364 | 0.512 | 0.578 | 9.80 |
| HAIS [2] | 0.320 | 0.465 | 0.506 | 7.11 |
| SoftGroup [3] | 0.383 | 0.446 | 0.487 | 6.55 |
| DyCo3D [4] | 0.285 | 0.376 | 0.498 | 5.20 |
| DKNet [5] | 0.383 | 0.434 | 0.474 | 2.15 |
| B-Seg (Ours) | 0.453 | 0.550 | 0.672 | 1.19 |
| Method | ↑AP | ↑AP50 | ↑AP25 | ↓T(s) |
|---|---|---|---|---|
| PointGroup [1] | 0.502 | 0.662 | 0.748 | 5.90 |
| HAIS [2] | 0.383 | 0.616 | 0.711 | 3.62 |
| SoftGroup [3] | 0.536 | 0.649 | 0.721 | 3.61 |
| DyCo3D [4] | 0.470 | 0.620 | 0.732 | 3.04 |
| DKNet [5] | 0.474 | 0.575 | 0.650 | 1.20 |
| B-Seg (Ours) | 0.549 | 0.674 | 0.767 | 0.99 |
| Method | ↑AP | ↑AP50 | ↑AP25 | ↓T(s) |
|---|---|---|---|---|
| PointGroup [1] | 0.318 | 0.443 | 0.556 | 5.73 |
| HAIS [2] | 0.159 | 0.249 | 0.350 | 3.17 |
| SoftGroup [3] | 0.151 | 0.199 | 0.300 | 3.06 |
| DyCo3D [4] | 0.020 | 0.045 | 0.196 | 1.77 |
| DKNet [5] | 0.077 | 0.154 | 0.253 | 1.78 |
| B-Seg (Ours) | 0.402 | 0.513 | 0.618 | 1.16 |
| Method | ↑AP | ↑AP50 | ↑AP25 | ↓T(s) |
|---|---|---|---|---|
| PointGroup [1] | 0.117 | 0.235 | 0.455 | 3.65 |
| HAIS [2] | 0.002 | 0.012 | 0.146 | 3.26 |
| SoftGroup [3] | 0.253 | 0.364 | 0.439 | 2.16 |
| DyCo3D [4] | 0.029 | 0.063 | 0.180 | 1.67 |
| DKNet [5] | 0.044 | 0.109 | 0.251 | 0.88 |
| B-Seg (Ours) | 0.261 | 0.386 | 0.535 | 0.74 |
5.92GB
2.49GB
3D RECONSTRUCTION



LOD RECONSTRUCTION

Kinetic Shape Reconstruction
VITUAL SCENE DESIGN